Description
MiniUGV20C ROS Robot Chassis 4WD Robot Platform (Honeycomb Wheel Version with 20kg Load Capacity)
Features:
4WD Suspended Robot Chassis
* ROS robot car 4WD platform supports ROS, NVIDIA, Ubuntu, and SLAM
4WD Independent Parallel Suspension
* 2.5mm steel plate welding, stainless steel swing arm, full metal shock absorbers, and balanced traction on all four wheels make it suitable for indoor and outdoor surfaces
Why Robot Cars Need Suspension
* Suspension connects the wheels to the chassis, providing support and shock absorption. It allows the wheels to adapt to uneven surfaces and buffers impacts transmitted to the frame or body. Non-suspension vehicles, due to three-point contact, inevitably have at least one wheel off the ground, resulting in poor performance during motion and negatively affecting SLAM mapping and navigation.
* The MiniUGV20C suspension ensures all four tires maintain contact with the ground, effectively aligning odometry calculations with the vehicle's actual position and orientation.
Optical Encoder Reduction Motor
* Full metal gearbox, reinforced gears, and optical encoder
400-line Optical Encoder
* The MiniUGV20C chassis motors use high-precision 400-line optical encoders, providing feedback accuracy 36.36×/25× higher than 11-/16-line Hall encoders. High-precision encoders ensure accurate odometry and trajectory estimation.
Technical Parameters:
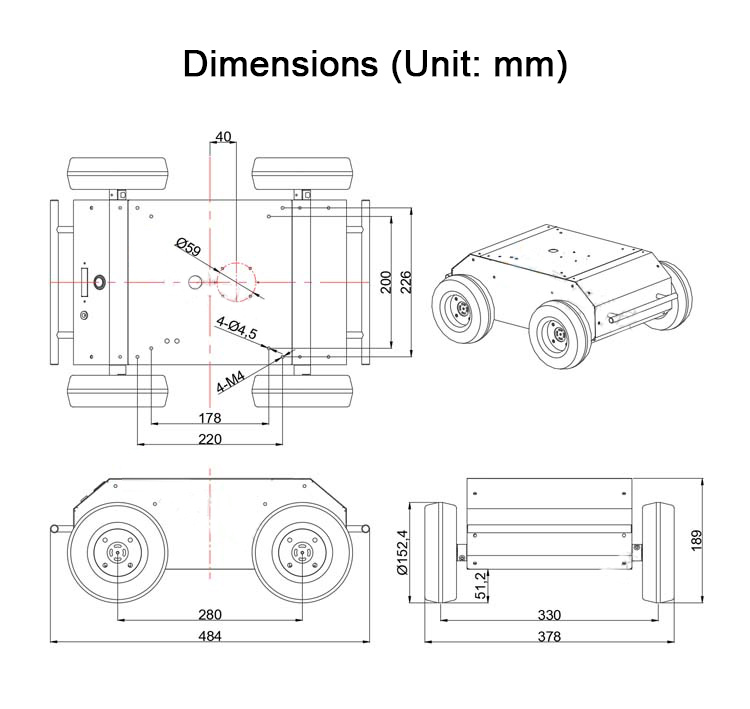
* Overall Dimensions: 484mm×378mm×189mm
* Chassis Material: Spray powder coating process
* Chassis Weight: 13.3kg
* Maximum Load: 20kg (30kg for the version with Mecanum wheels)
* Shock Absorption: Parallel suspension (independent suspension)
* Optional Wheels: Honeycomb wheels, Mecanum wheels or road wheels
* Motor: High-torque DC motor
* Maximum Climbing Angle: 30°
* Encoder: 400-line optical encoder
* Maximum Speed: 2.0m/s
* Unloaded Endurance at 1m/s: 7 hours
* Load 5kg Endurance at 1m/s: 6 hours
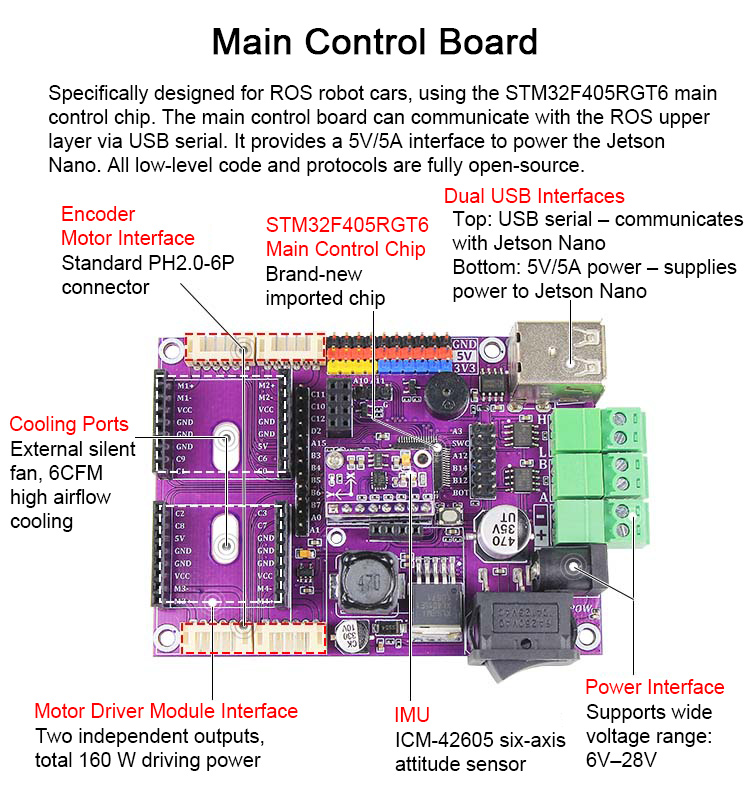
* Low-Level Motion Control: STM32F405 main control board
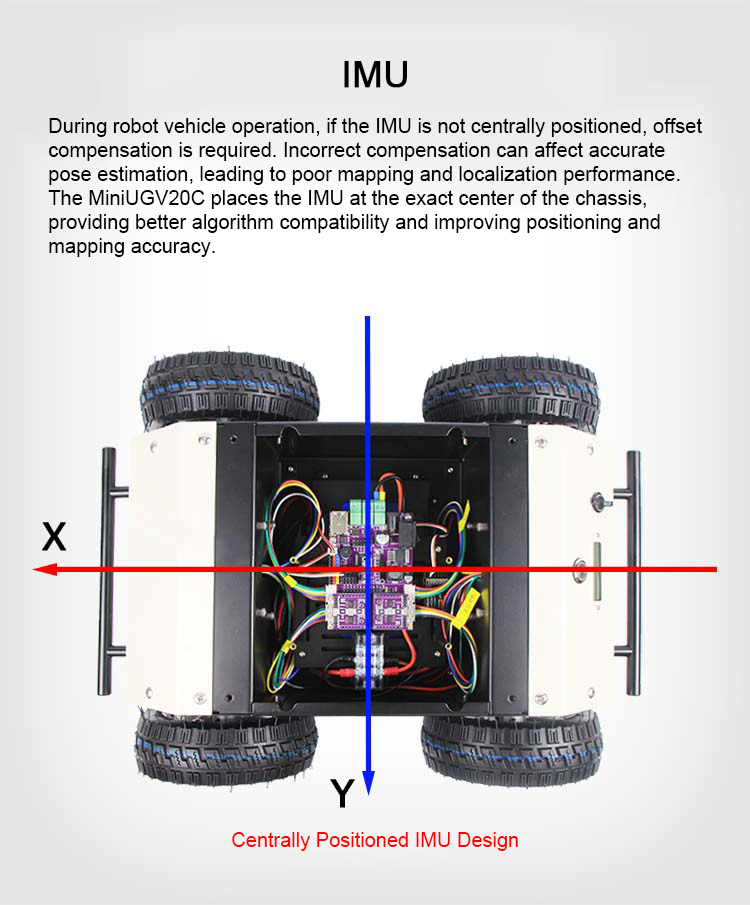
* IMU: ICM-42605 six-axis attitude sensor
* Control Method: Serial communication, RC model remote control
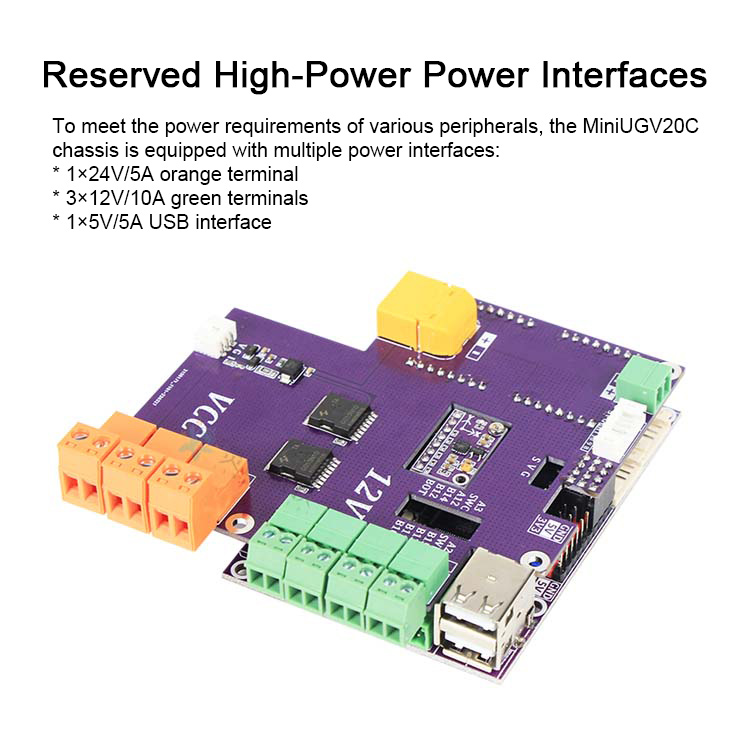
* Reserved Power Interfaces: 1×24V/5A, 3×12V/10A
Packing List:
* 1 × Set of Robot Chassis
Packaging Details:
* Weight: 17kg
MiniUGV20C ROS Robot Chassis 4WD Robot Platform (Road Wheel Version with 20kg Load Capacity)
Features:
4WD Suspended Robot Chassis
* ROS robot car 4WD platform supports ROS, NVIDIA, Ubuntu, and SLAM
4WD Independent Parallel Suspension
* 2.5mm steel plate welding, stainless steel swing arm, full metal shock absorbers, and balanced traction on all four wheels make it suitable for indoor and outdoor surfaces
Why Robot Cars Need Suspension
* Suspension connects the wheels to the chassis, providing support and shock absorption. It allows the wheels to adapt to uneven surfaces and buffers impacts transmitted to the frame or body. Non-suspension vehicles, due to three-point contact, inevitably have at least one wheel off the ground, resulting in poor performance during motion and negatively affecting SLAM mapping and navigation.
* The MiniUGV20C suspension ensures all four tires maintain contact with the ground, effectively aligning odometry calculations with the vehicle's actual position and orientation.
Optical Encoder Reduction Motor
* Full metal gearbox, reinforced gears, and optical encoder
400-line Optical Encoder
* The MiniUGV20C chassis motors use high-precision 400-line optical encoders, providing feedback accuracy 36.36×/25× higher than 11-/16-line Hall encoders. High-precision encoders ensure accurate odometry and trajectory estimation.
Technical Parameters:
* Overall Dimensions: 484mm×378mm×189mm
* Chassis Material: Spray powder coating process
* Chassis Weight: 13.3kg
* Maximum Load: 20kg (30kg for the version with Mecanum wheels)
* Shock Absorption: Parallel suspension (independent suspension)
* Optional Wheels: Honeycomb wheels, Mecanum wheels or road wheels
* Motor: High-torque DC motor
* Maximum Climbing Angle: 30°
* Encoder: 400-line optical encoder
* Maximum Speed: 2.0m/s
* Unloaded Endurance at 1m/s: 7 hours
* Load 5kg Endurance at 1m/s: 6 hours
* Low-Level Motion Control: STM32F405 main control board
* IMU: ICM-42605 six-axis attitude sensor
* Control Method: Serial communication, RC model remote control
* Reserved Power Interfaces: 1×24V/5A, 3×12V/10A
Packing List:
* 1 × Set of Robot Chassis
Packaging Details:
* Weight: 17kg
MiniUGV20C ROS Robot Chassis 4WD Robot Platform (Mecanum Wheel Version with 30kg Load Capacity)
Features:
4WD Suspended Robot Chassis
* ROS robot car 4WD platform supports ROS, NVIDIA, Ubuntu, and SLAM
4WD Independent Parallel Suspension
* 2.5mm steel plate welding, stainless steel swing arm, full metal shock absorbers, and balanced traction on all four wheels make it suitable for indoor and outdoor surfaces
Why Robot Cars Need Suspension
* Suspension connects the wheels to the chassis, providing support and shock absorption. It allows the wheels to adapt to uneven surfaces and buffers impacts transmitted to the frame or body. Non-suspension vehicles, due to three-point contact, inevitably have at least one wheel off the ground, resulting in poor performance during motion and negatively affecting SLAM mapping and navigation.
* The MiniUGV20C suspension ensures all four tires maintain contact with the ground, effectively aligning odometry calculations with the vehicle's actual position and orientation.
Optical Encoder Reduction Motor
* Full metal gearbox, reinforced gears, and optical encoder
400-line Optical Encoder
* The MiniUGV20C chassis motors use high-precision 400-line optical encoders, providing feedback accuracy 36.36×/25× higher than 11-/16-line Hall encoders. High-precision encoders ensure accurate odometry and trajectory estimation.
Technical Parameters:
* Overall Dimensions: 484mm×378mm×189mm
* Chassis Material: Spray powder coating process
* Chassis Weight: 13.3kg
* Maximum Load: 20kg (30kg for the version with Mecanum wheels)
* Shock Absorption: Parallel suspension (independent suspension)
* Optional Wheels: Honeycomb wheels, Mecanum wheels or road wheels
* Motor: High-torque DC motor
* Maximum Climbing Angle: 30°
* Encoder: 400-line optical encoder
* Maximum Speed: 2.0m/s
* Unloaded Endurance at 1m/s: 7 hours
* Load 5kg Endurance at 1m/s: 6 hours
* Low-Level Motion Control: STM32F405 main control board
* IMU: ICM-42605 six-axis attitude sensor
* Control Method: Serial communication, RC model remote control
* Reserved Power Interfaces: 1×24V/5A, 3×12V/10A
Packing List:
* 1 × Set of Robot Chassis
Packaging Details:
* Weight: 17kg
Note:
* The chassis has been assembled. And it is ready to use.
* Only the version with honeycomb wheels can be used with the optional robot charging station.
* The following images are for reference only. The functions of the robot chassis depend on the actual version you select. Thank you for your understanding!

Features:
4WD Suspended Robot Chassis
* ROS robot car 4WD platform supports ROS, NVIDIA, Ubuntu, and SLAM
4WD Independent Parallel Suspension
* 2.5mm steel plate welding, stainless steel swing arm, full metal shock absorbers, and balanced traction on all four wheels make it suitable for indoor and outdoor surfaces
Why Robot Cars Need Suspension
* Suspension connects the wheels to the chassis, providing support and shock absorption. It allows the wheels to adapt to uneven surfaces and buffers impacts transmitted to the frame or body. Non-suspension vehicles, due to three-point contact, inevitably have at least one wheel off the ground, resulting in poor performance during motion and negatively affecting SLAM mapping and navigation.
* The MiniUGV20C suspension ensures all four tires maintain contact with the ground, effectively aligning odometry calculations with the vehicle's actual position and orientation.
Optical Encoder Reduction Motor
* Full metal gearbox, reinforced gears, and optical encoder
400-line Optical Encoder
* The MiniUGV20C chassis motors use high-precision 400-line optical encoders, providing feedback accuracy 36.36×/25× higher than 11-/16-line Hall encoders. High-precision encoders ensure accurate odometry and trajectory estimation.
Technical Parameters:
* Overall Dimensions: 484mm×378mm×189mm
* Chassis Material: Spray powder coating process
* Chassis Weight: 13.3kg
* Maximum Load: 20kg (30kg for the version with Mecanum wheels)
* Shock Absorption: Parallel suspension (independent suspension)
* Optional Wheels: Honeycomb wheels, Mecanum wheels or road wheels
* Motor: High-torque DC motor
* Maximum Climbing Angle: 30°
* Encoder: 400-line optical encoder
* Maximum Speed: 2.0m/s
* Unloaded Endurance at 1m/s: 7 hours
* Load 5kg Endurance at 1m/s: 6 hours
* Low-Level Motion Control: STM32F405 main control board
* IMU: ICM-42605 six-axis attitude sensor
* Control Method: Serial communication, RC model remote control
* Reserved Power Interfaces: 1×24V/5A, 3×12V/10A
Packing List:
* 1 × Set of Robot Chassis
Packaging Details:
* Weight: 17kg
MiniUGV20C ROS Robot Chassis 4WD Robot Platform (Road Wheel Version with 20kg Load Capacity)
Features:
4WD Suspended Robot Chassis
* ROS robot car 4WD platform supports ROS, NVIDIA, Ubuntu, and SLAM
4WD Independent Parallel Suspension
* 2.5mm steel plate welding, stainless steel swing arm, full metal shock absorbers, and balanced traction on all four wheels make it suitable for indoor and outdoor surfaces
Why Robot Cars Need Suspension
* Suspension connects the wheels to the chassis, providing support and shock absorption. It allows the wheels to adapt to uneven surfaces and buffers impacts transmitted to the frame or body. Non-suspension vehicles, due to three-point contact, inevitably have at least one wheel off the ground, resulting in poor performance during motion and negatively affecting SLAM mapping and navigation.
* The MiniUGV20C suspension ensures all four tires maintain contact with the ground, effectively aligning odometry calculations with the vehicle's actual position and orientation.
Optical Encoder Reduction Motor
* Full metal gearbox, reinforced gears, and optical encoder
400-line Optical Encoder
* The MiniUGV20C chassis motors use high-precision 400-line optical encoders, providing feedback accuracy 36.36×/25× higher than 11-/16-line Hall encoders. High-precision encoders ensure accurate odometry and trajectory estimation.
Technical Parameters:
* Overall Dimensions: 484mm×378mm×189mm
* Chassis Material: Spray powder coating process
* Chassis Weight: 13.3kg
* Maximum Load: 20kg (30kg for the version with Mecanum wheels)
* Shock Absorption: Parallel suspension (independent suspension)
* Optional Wheels: Honeycomb wheels, Mecanum wheels or road wheels
* Motor: High-torque DC motor
* Maximum Climbing Angle: 30°
* Encoder: 400-line optical encoder
* Maximum Speed: 2.0m/s
* Unloaded Endurance at 1m/s: 7 hours
* Load 5kg Endurance at 1m/s: 6 hours
* Low-Level Motion Control: STM32F405 main control board
* IMU: ICM-42605 six-axis attitude sensor
* Control Method: Serial communication, RC model remote control
* Reserved Power Interfaces: 1×24V/5A, 3×12V/10A
Packing List:
* 1 × Set of Robot Chassis
Packaging Details:
* Weight: 17kg
MiniUGV20C ROS Robot Chassis 4WD Robot Platform (Mecanum Wheel Version with 30kg Load Capacity)
Features:
4WD Suspended Robot Chassis
* ROS robot car 4WD platform supports ROS, NVIDIA, Ubuntu, and SLAM
4WD Independent Parallel Suspension
* 2.5mm steel plate welding, stainless steel swing arm, full metal shock absorbers, and balanced traction on all four wheels make it suitable for indoor and outdoor surfaces
Why Robot Cars Need Suspension
* Suspension connects the wheels to the chassis, providing support and shock absorption. It allows the wheels to adapt to uneven surfaces and buffers impacts transmitted to the frame or body. Non-suspension vehicles, due to three-point contact, inevitably have at least one wheel off the ground, resulting in poor performance during motion and negatively affecting SLAM mapping and navigation.
* The MiniUGV20C suspension ensures all four tires maintain contact with the ground, effectively aligning odometry calculations with the vehicle's actual position and orientation.
Optical Encoder Reduction Motor
* Full metal gearbox, reinforced gears, and optical encoder
400-line Optical Encoder
* The MiniUGV20C chassis motors use high-precision 400-line optical encoders, providing feedback accuracy 36.36×/25× higher than 11-/16-line Hall encoders. High-precision encoders ensure accurate odometry and trajectory estimation.
Technical Parameters:
* Overall Dimensions: 484mm×378mm×189mm
* Chassis Material: Spray powder coating process
* Chassis Weight: 13.3kg
* Maximum Load: 20kg (30kg for the version with Mecanum wheels)
* Shock Absorption: Parallel suspension (independent suspension)
* Optional Wheels: Honeycomb wheels, Mecanum wheels or road wheels
* Motor: High-torque DC motor
* Maximum Climbing Angle: 30°
* Encoder: 400-line optical encoder
* Maximum Speed: 2.0m/s
* Unloaded Endurance at 1m/s: 7 hours
* Load 5kg Endurance at 1m/s: 6 hours
* Low-Level Motion Control: STM32F405 main control board
* IMU: ICM-42605 six-axis attitude sensor
* Control Method: Serial communication, RC model remote control
* Reserved Power Interfaces: 1×24V/5A, 3×12V/10A
Packing List:
* 1 × Set of Robot Chassis
Packaging Details:
* Weight: 17kg
Note:
* The chassis has been assembled. And it is ready to use.
* Only the version with honeycomb wheels can be used with the optional robot charging station.
* The following images are for reference only. The functions of the robot chassis depend on the actual version you select. Thank you for your understanding!




Payment Terms
1. We accept PayPal,Payoneer,Visa Card,Google pay,Credit card etc.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
Shipping Terms
1. We will process the order within the handling time ,if you have any questions, please contact us via eBay message or email.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
Return Terms
If
you receive the item that not satisfied or defective, please do not
open case and kindly notify us within 30 days. We will guide you the
returning process for replacement or refund.
Custom Duties & Taxes
1.
It is buyer's responsibility to cover the import duties, taxes.We do
not charge any taxes and fees, and the possible taxes and fees will be
collected by the platform or by third parties such as customs and
carriers.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
Feedback
1.
Please kindly leave us a positive feedback and 5 star DSR if you
satisfied with our product and service. Please feel free to contact us
firstly if you have any problem with your order, we are responsible and
credible seller and will solve the issue it for you asap.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.
On Oct 29, 2025 at 02:43:22 PDT, seller added the following information: