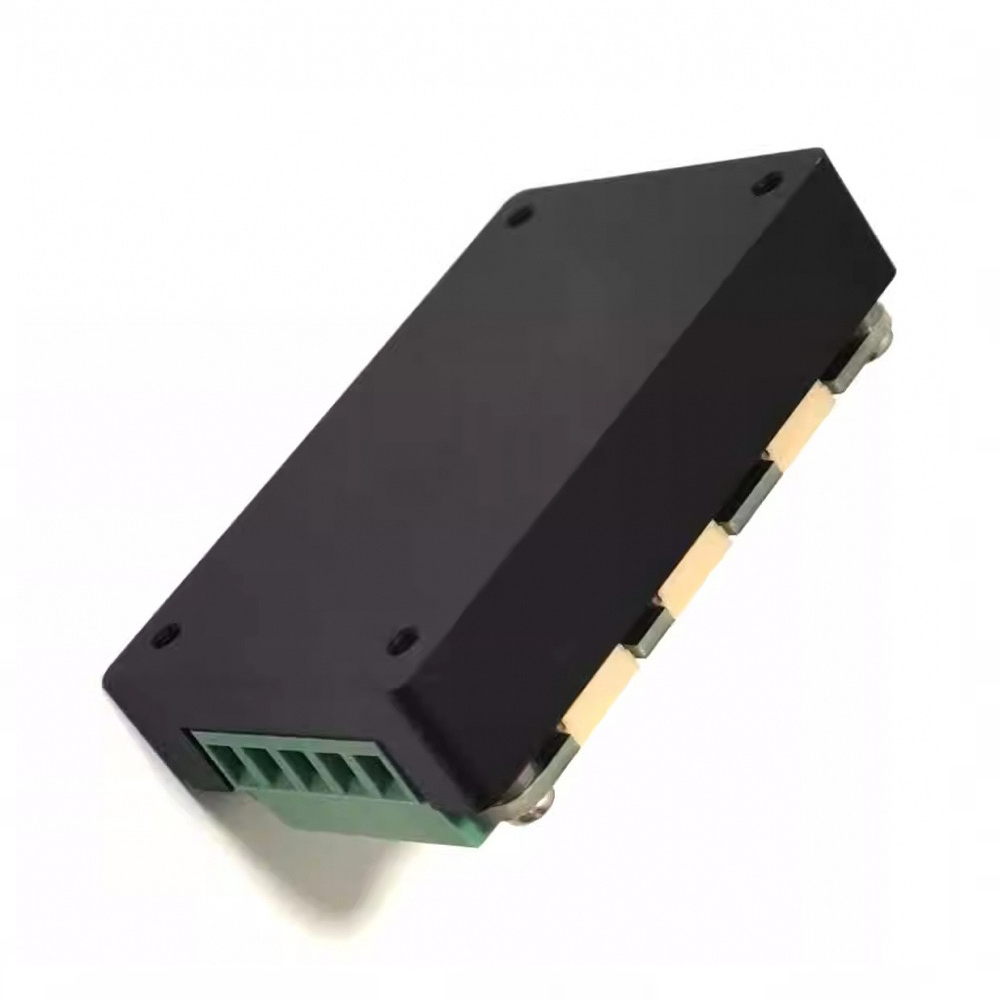




DC12-48V Motor Drive Board Servo Motor Development Board Servo C2 BLDC PMSM Three-phase Motor STM32G431 FOC Control Module
Specifications:
Input voltage: 12~48VDC
Rated current: 10A, peak current: 30A, built-in fuse
Small size 42mm*67mm*20mm
STM32G431CBU6 main control, HAL library configuration peripherals, self-implemented vector control algorithm, non-ST library
1 channel communication encoder interface, can be adapted to the shop communication single-turn absolute encoder
1 channel ABZ incremental encoder interface TTL level signal
1 channel 485 communication port for receiving control commands
1 channel CAN communication interface for receiving control commands
The SWD debugging interface is introduced to facilitate the debugging of program development
1 channel serial UART TTL can be used to connect to the upper computer
1 channel and 4 lines SPI interface, convenient for later development and upgrading
Provide PDF version schematics and matching program source code
The PWM frequency is 16Khz, the current loop control frequency is 16Khz, the speed loop control frequency is 4Khz, the position loop control frequency is 1Khz
With the MODBUS communication protocol, MODBUS commands can be sent through the 485 interface or 232 (TTL) interface to control the motor.
Supporting program source code: (development environment keil MDK5.25 and above version, non-ST library, based on HAL library development, motor control part of their own implementation, clear structure, easy to secondary development)
1, open loop vector control: no need to connect the hall signal, only need to connect the motor dynamics U, V, W, can achieve 0~500rpm low speed operation. (Disadvantage: the motor heat is relatively large)
2, servo speed closed-loop control: need to adapt to the shop communication type single-cycle absolute encoder motor (36ST79, 57ST70), can achieve 0~3000rpm speed operation (specific maximum running speed depends on the motor characteristics and power supply voltage), no open loop control shortcomings, PID speed closed-loop, according to the load size automatically adjust the current.
3, servo position closed-loop control: need to adapt to the shop communication type single-turn absolute encoder motor (36ST79, 57ST70), can achieve accurate position control (encoder resolution +/-1), PID speed, position closed-loop, according to the load size automatically adjust the current.
Note:
1. Due to the light and screen difference, the item's color may be slightly different from the pictures.
2. Please allow 1mm-1cm differences due to manual measurement.
Package Included:
1x Motor Driver Board