CANduino v4 ATmega328P USB-C PCB mit CAN-Bus MCP25625 Modul Arduino Kompatibel
CANduino v4 mit ATmega328P, MCP25625 (MCP2515 und MCP2551) und CP2102 Chip.
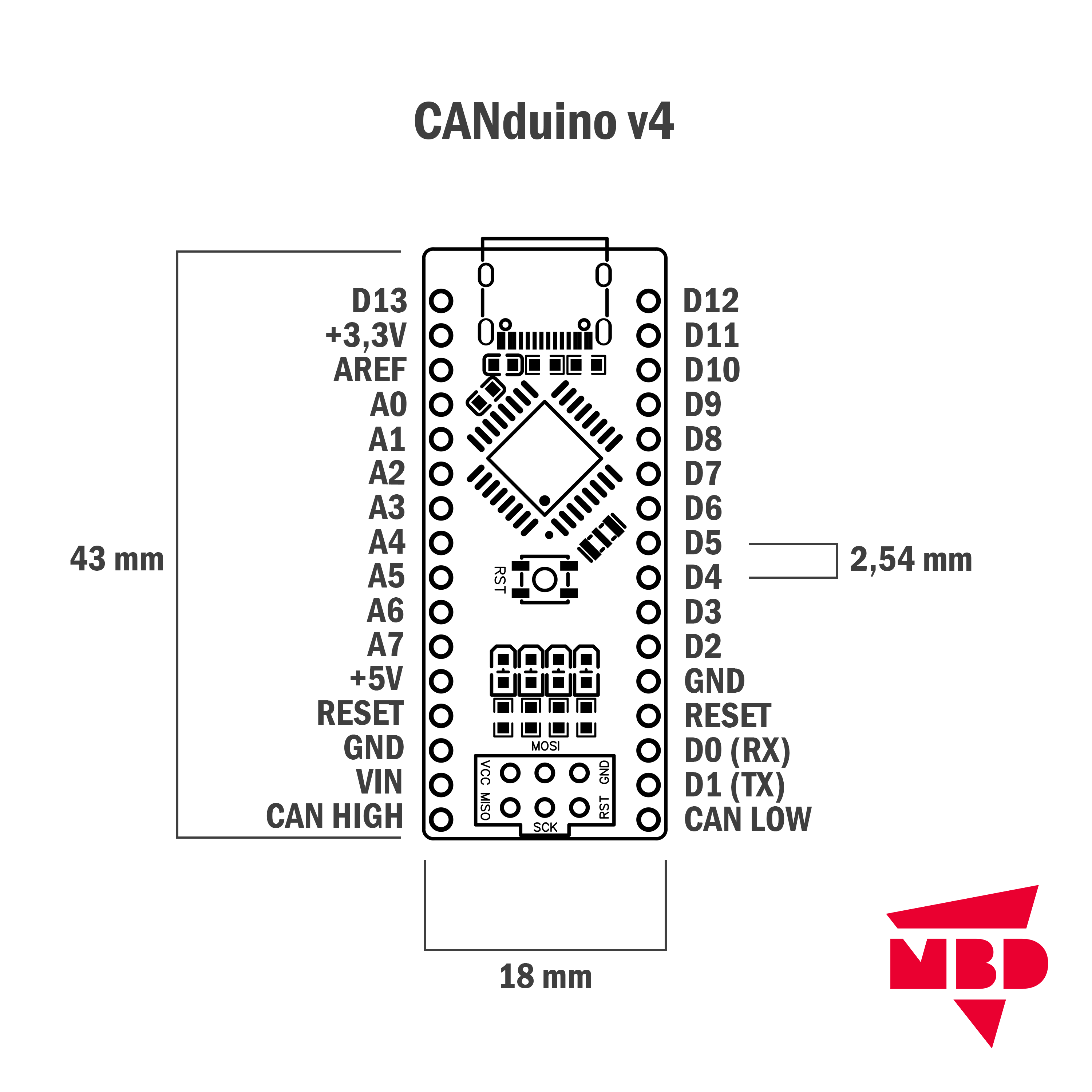
Der CANduino v4 hat die Größe eines Arduino Nano und ergänzt mit dem CAN-Controller und -Transceiver MCP25625 die Möglichkeit der Kommunikation über CAN-Bus. Ein großer Vorteil ist der kleine Formfaktor und die Möglichkeit der Programmierung über eine USB-C-Schnittstelle. Der CAN-Bus des CANduino ist auf dieselbe Art ansprechbar (mit denselben Bibliotheken), wie ein Arduino Nano in Kombination mit einem CAN-Modul mit MCP2515 CAN-Controller.
Über zwei Jumper kann der CAN-Controller deaktiviert werden und ein 120-Ohm-Widerstand als Abschlusswiderstand zwischen CAN-High und CAN-Low geschaltet werden. Standardmäßig sind die Jumper verbunden.
Bitte beachten Sie, dass der CAN-Controller die Pins D2, D10, D11, D12 und D13 nutzt und diese dementsprechend bei aktivem CAN-Bus nicht oder nur eingeschränkt nutzbar sind!
Unter dem folgenden Link finden Sie weitere wichtige Informationen zur Inbetriebnahme:
Ein kompatibles BreakOut-Modul mit Schraubklemmen finden Sie unter folgendem Link:
Technische Daten:
Mikrocontroller: Atmel ATmega328P
Taktgeschwindigkeit: 16 MHz
Betriebsspannung: 5 V
Eingangsspannung: (VIN) 7-12 V
Strom pro I/O-Pin: 20 mA
Digital I/O-Pins: 14 (6 PWM)
Analog Input Pins: 8
CAN (HIGH-, LOW-Pin): 2
Flash-Speicher: 32 KB
SRAM: 2 KB
EEPROM: 1 KB
CAN-Controller /- Transceiver: MCP25625
USB-Anschluss: USB-C Buchse
USB-Chip: CP2102
WICHTIG:
Der CANduino v4 verwendet den CP2102 USB-Controller, in seltenen Fällen muss unter Windows der entsprechende Treiber heruntergeladen werden!
Lieferumfang:
1x CANduino v4 ATmega328P MCP25625 mit CP2102 Chip (je nach Auswahl mit verlöteten oder beiliegenden Stiftleisten)