Description
IP870 Standard Second-Order Linear Inverted Pendulum with Desk Clamp Supports First-Order Function
Product Introduction:
The second-order inverted pendulum system is a complex high-order, multi-variable, nonlinear, strongly coupled, and naturally unstable system. This product conducts dynamic analysis on the second-order linear inverted pendulum based on Lagrangian mechanics, solves the state space expression of the system, and then realizes stable control of the second-order inverted pendulum through LQR control. And through hardware optimization, the product has a super high cost performance.
Features:
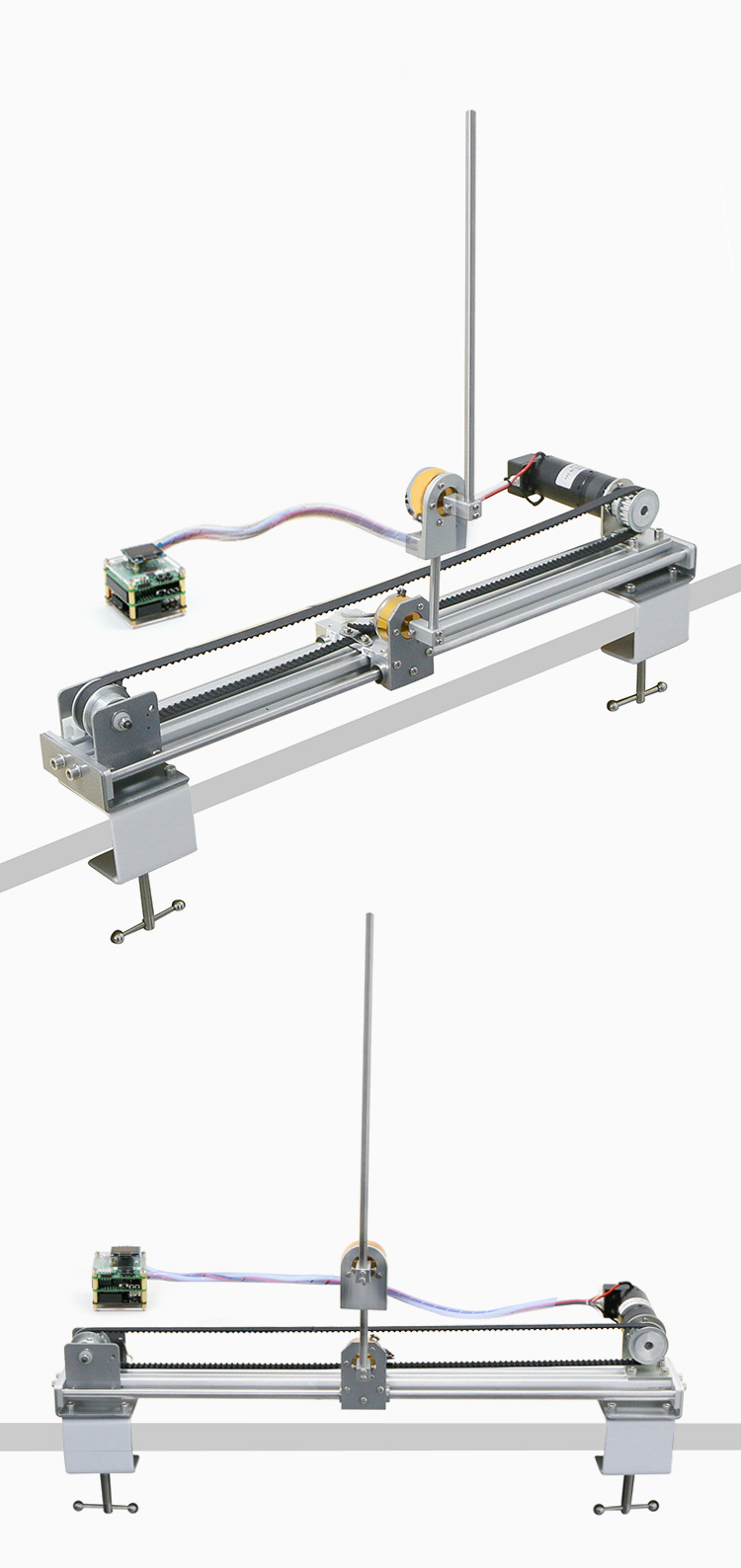
WHEELTEC IP870 Standard second-order linear inverted pendulum
* Super cost-effective
* Fully open source code
* Based on LQR algorithm control
Advantages
* LQR control
* Lagrangian mechanics
* State space representation
* Provides principle tutorials
* High-precision GMR encoder
* Precision planetary reduction motor
* High-precision CNC machining
* Modular design
* Stall protection
* Reverse connection protection
* Over-current protection
* Posture over-limit protection
* Resistant to external interference
* Supports button control
* Supports zero point calibration
* With running status feedback
* Provides host computer
* Provides details
* All code is open source
* Free information updates
Supports first-order functions
* It supports first-order inverted pendulum LQR control, automatic swing start, and automatic zero point calibration.
* Provides source code routines
* The second-order inverted pendulum can be converted into a first-order version
* Note: The automatic swing-starting function of the second-order inverted pendulum is being improved and adapted, so stay tuned.
The code is fully open source and it supports secondary development
* The inverted pendulum is a high-order under-actuated control product with relatively complex overall hardware and software. WHEELTEC has invested a lot of R&D efforts in developing this product, and its code is fully open source. Users can quickly carry out secondary development of second-order under-actuated or intelligent control projects based on this product.
Provides modeling and implementation tutorials for stable swing control based on LQR algorithm
* This product performs dynamic analysis on the second-order linear inverted pendulum based on Lagrangian mechanics, solves the state space expression of the system, and then realizes stable control of the second-order inverted pendulum through LQR control.
Excellent value for money
* The price of a second-order inverted pendulum on the market is generally over tens of thousands. WHEELTEC has developed and launched this cost-effective second-order inverted pendulum through its strong software and hardware capabilities, which is affordable for most scientific researchers.
Key Functions
* Stable against external interference: It has good robustness and can quickly recover stability after external interference.
* Built-in posture over-limit protection: When the inverted pendulum posture (slider position, pendulum inclination angle) exceeds the limit, the program determines that it cannot restore balance. And it will automatically shut down the motor to avoid safety problems caused by forced control.
* Built-in motor stall protection: The system will automatically detect the motor status and automatically shut down the motor if it is blocked.
* Convenient and fast system status feedback function: The OLED display screen shows system status data. The LED light monitors and feed-backs the system operation status/mode. LED light distinguishes the status by flashing times and frequency.
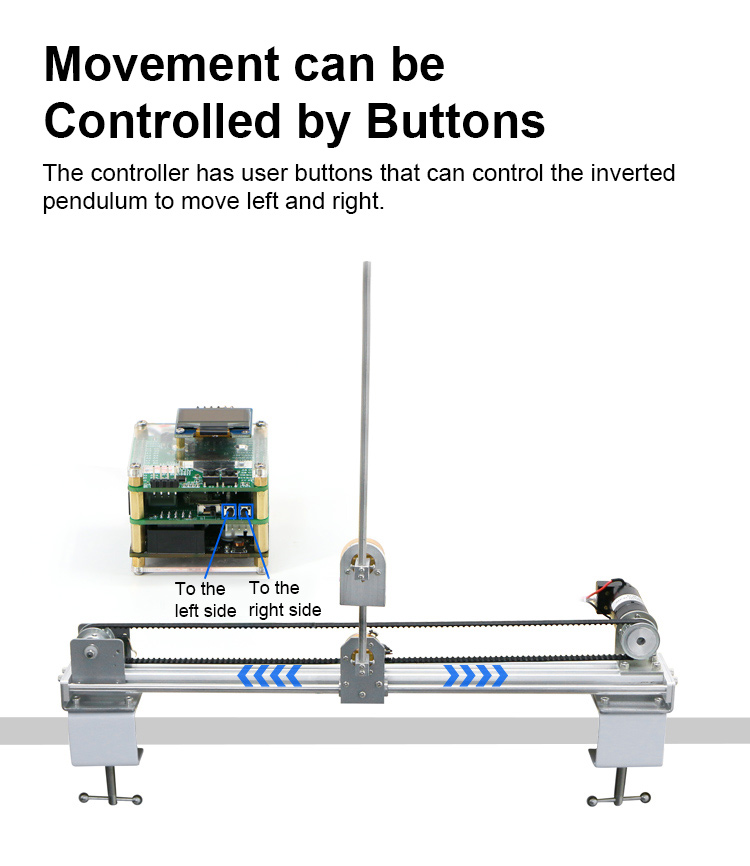
* Movement can be controlled by buttons: The controller has user buttons that can control the inverted pendulum to move left and right
* Built-in automatic zero point calibration: After startup, click the user button and the system will automatically find and update the positioning zero point.
Equipped with high-power power adapter
* Built-in short circuit, over-current and other multiple protections
Product Application Areas:
* Learning Platform for Under-actuated Control
* Teaching Tool for Automatic Control Laboratories
* Development Platform for Intelligent Control Algorithms
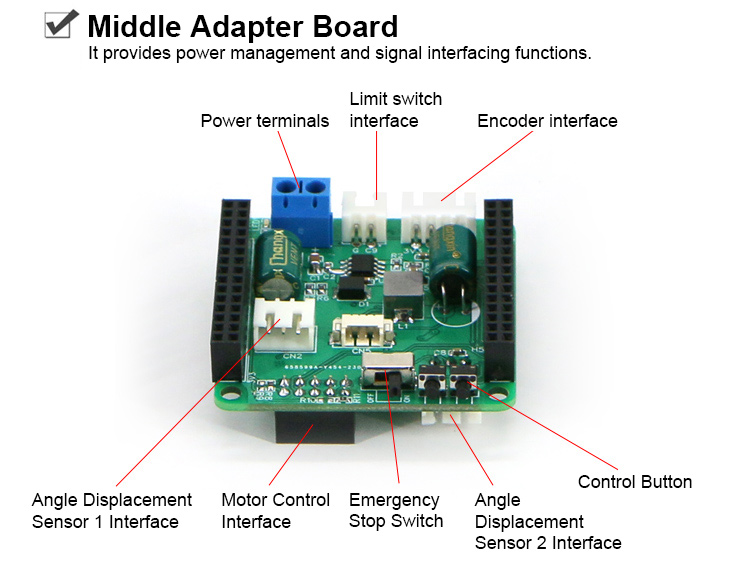
Controller Resource List:
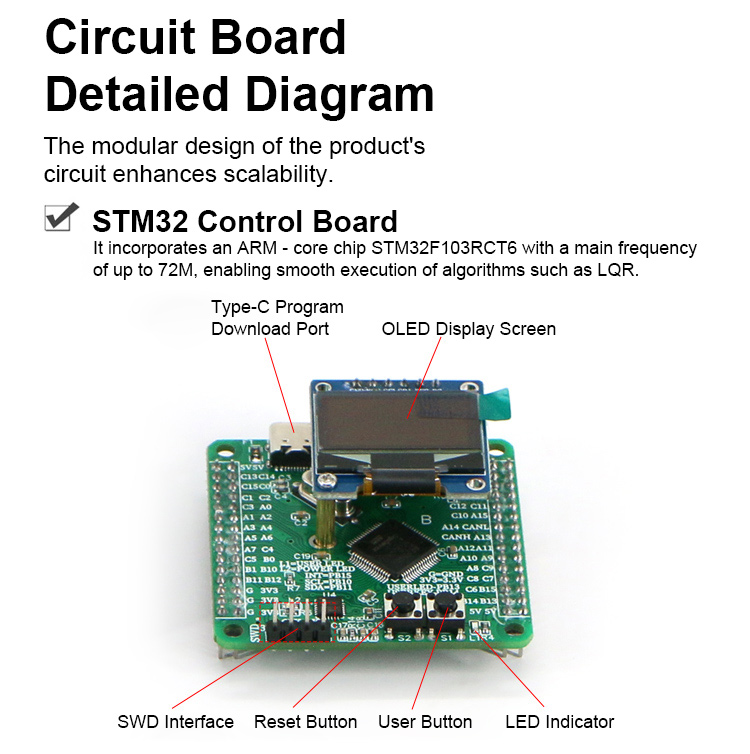
* Product: STM32 Main Control
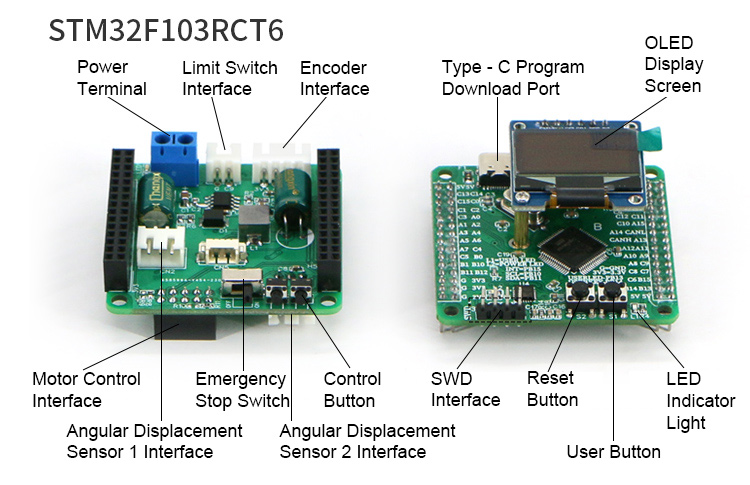
* Main Control Chip: STM32F103RCT6
* OLED Display Interface: 1
* Buttons: 1 Reset Button, 3 Programmable Buttons
* LEDs: 1 Programmable LED, Several Other Power Indicator LEDs
* Power Terminals: 2
* Limit Switch Interface: 1
* Emergency Stop Switch: 1
* Angular Displacement Sensor Interface: 2
* Motor Encoder Interface: 1
* Motor Drive Interface: 2
* Bluetooth Interface (Reserved): 1
* IMU Chip (Reserved): MPU6050
* Download Interface: Supports One-Key Download via Type-C Serial Port, and SWD Download
Comprehensive Hardware and Software Overview:
* Simulink Simulation Source Code Provided: Simulates the impact of different parameters on control system performance
* Windows-Based Host Computer Software Provided: Enables real-time monitoring of the inverted pendulum system
* Diverse Program Project Files: Offers both standard library and HAL library source codes to accommodate different development preferences
* Planetary Reducer Motor with High-precision Encoder: Precision planetary reducer motor and built-in 500-line high-precision GMR encoder
Documentation Information:
* We can provide English resources, including source code with English comments, English documentation, and video tutorials with English subtitles. Please contact customer service after purchasing the product if needed.
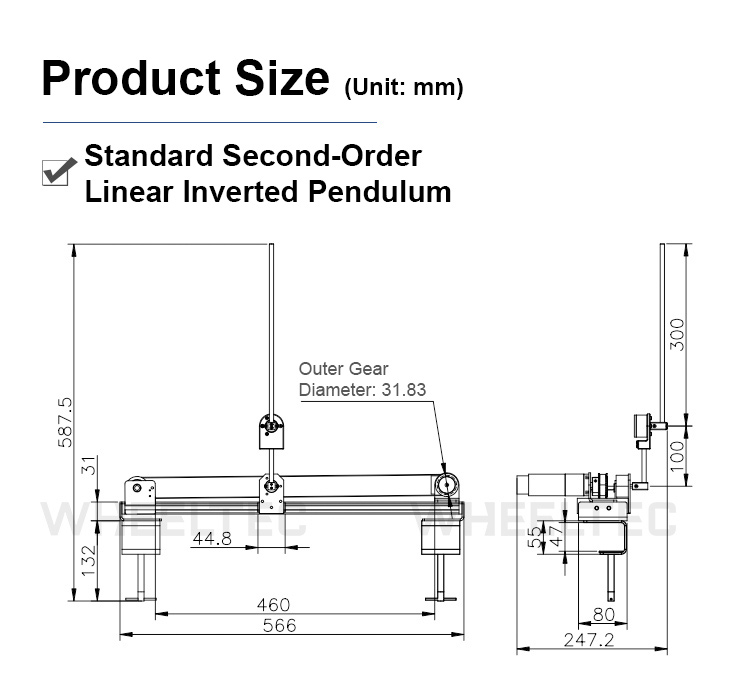
Product Specifications:
* Model: IP870
* Product: Standard Second-order Linear Inverted Pendulum
* Dimensions: 585×460×170mm (including pendulum rod)
* Weight: 3.3kg (including pendulum rod)
* Motor Model: MD36N_P5.18
* Encoder Specifications: 500-line AB-phase GMR encoder
* Slider Travel: 395mm
* Mounting Base: 2 pcs
* Main Control Chip: STM32F103RCT6
* Travel Switch: 1 pc
* Program Download Port: Default Type-C serial one-click download, SWD interface reserved
* Emergency Stop Switch: 1 pc
* Display: 0.96-inch OLED screen
* Core Board Protection Features: Reverse polarity protection, over-current protection, short-circuit protection, motor stall protection, and electrostatic protection
* Control Algorithm: LQR
Motor and Encoder Parameters:
* Encoder Type: GMR Encoder
* Rated Voltage: 24V
* Motor Type: Brushed DC Motor
* Rated Current: 2.3A
* Rated Torque: 2.6 kg·cm
* Encoder Resolution: 500 PPR
* Rated Power: Approx. 35W
* Stall Current: 7A
* Speed After Gear Reduction: 1690 ± 170 rpm
* Output Shaft: 8mm diameter, with key-way design
Power Adapter Parameters:
* Input Parameters: 100-240V~ 50/60Hz 1.6A
* Input Connector: 2-pin power plug
* Output Parameters: 24V 10A
* Output Connector: DC 5.5×2.1mm (compatible with DC 5.5×2.5mm)
Package Contents:
* Sliding Rail Base ×1
* Dual-Section Pendulum Rod ×1
* High-Precision Angle Sensor ×2
* MD36N Planetary Gear Motor ×1
* 500-line High-Precision GMR Encoder ×1
* STM32 Controller ×1
* 24V 10A Power Adapter ×1
* Type-C Programming Cable ×1
* Small Flathead Screwdriver ×1
* Large Phillips Screwdriver ×1
Packaging Details:
* Weight: 3.5kg
Note:
* The desktop clamp pictured is included.

Payment Terms
1. We accept PayPal,Payoneer,Visa Card,Google pay,Credit card etc.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
Shipping Terms
1. We will process the order within the handling time ,if you have any questions, please contact us via eBay message or email.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
Return Terms
If you receive the item that not satisfied or defective, please do not open case and kindly notify us within 30 days. We will guide you the returning process for replacement or refund.
Custom Duties & Taxes
1. It is buyer's responsibility to cover the import duties, taxes.We do not charge any taxes and fees, and the possible taxes and fees will be collected by the platform or by third parties such as customs and carriers.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
Feedback
1. Please kindly leave us a positive feedback and 5 star DSR if you satisfied with our product and service. Please feel free to contact us firstly if you have any problem with your order, we are responsible and credible seller and will solve the issue it for you asap.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.